


void tskHighPrio(uint16_t param0, void *param1)
Definition: main.c:46
|
eRTK
|
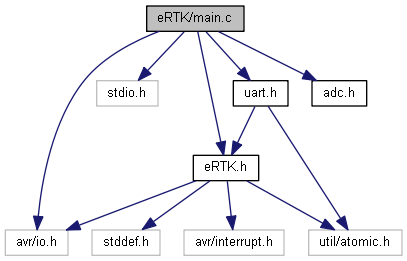
Go to the source code of this file.
Functions | |
| void | tskHighPrio (uint16_t param0, void *param1) |
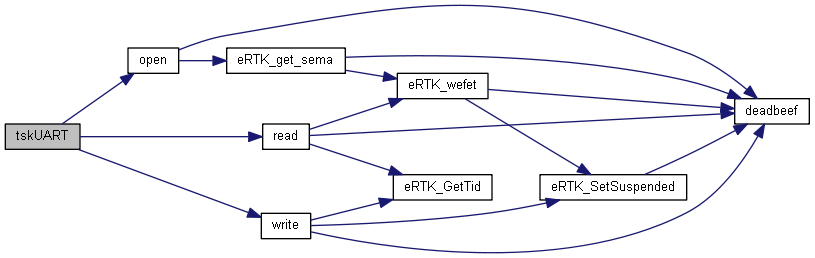
| void | tskUART (uint16_t param0, void *param1) |
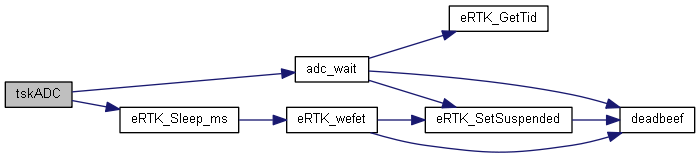
| void | tskADC (uint16_t param0, void *param1) |
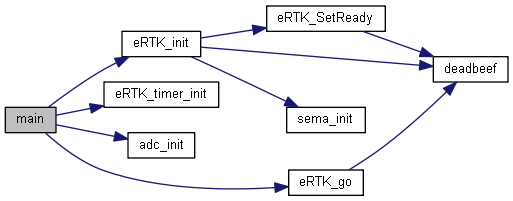
| int | main (void) |
Variables | |
| tadc | adc_cntrl [ANZ_ADC] |
| const t_eRTK_tcb | rom_tcb [VANZTASK] |
| int main | ( | void | ) |
| void tskADC | ( | uint16_t | param0, |
| void * | param1 | ||
| ) |
| void tskHighPrio | ( | uint16_t | param0, |
| void * | param1 | ||
| ) |
| void tskUART | ( | uint16_t | param0, |
| void * | param1 | ||
| ) |
Definition at line 59 of file main.c.
| const t_eRTK_tcb rom_tcb[VANZTASK] |
 1.8.7
1.8.7